Efficient single-winged aerial robots with reduced energy consumption
Flying robotic systems have already proved to be highly promising for tackling numerous real-world problems, including explorations of remote environments, the delivery of packages in inaccessible sites, and searches for survivors of natural disasters. In recent years, roboticists and computer scientists have introduced a multitude of aerial vehicle designs, each with distinct advantages and features.
Researchers at Sharif University of Technology in Iran recently carried out a study exploring the potential of flying robotic systems with a single wing, known as mono-wing aerial vehicles. Their paper, published in the Journal of Intelligent & Robotic Systems, outlines a new approach that could help to better control the flight of these vehicles as they navigate their surrounding environment.
“Unconventional vehicles inspired by natural phenomena consistently captivate the attention of engineers,” Afshin Banazadeh, one of the researchers who carried out the study, told Tech Xplore. “One such vehicle, the mono-wing, a single-bladed aerial vehicle, is no exception.
“When we began delving into the realm of these vehicles, we discovered a few studies on their dynamics. While these studies presented some initial aspects of the vehicle’s dynamics, they left many unknown parameters and ambiguities requiring interpretation. It was at this point that our curiosity was piqued, recognizing our responsibility as members of the engineering community to unveil the secrets of the mono-wing’s dynamics through the implementation of the system identification technique.”
After reviewing past research efforts aimed at developing mono-wing aerial vehicles, Banazadeh and his colleagues set out to better understand the intricate dynamics underpinning their functioning. Their hope was to devise new strategies that could improve their performance, allowing researchers to better control their movements in the air.
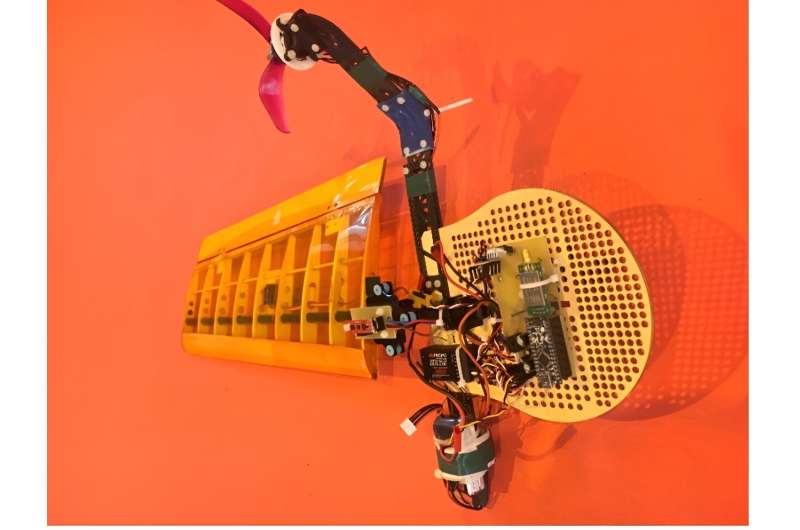
In their paper, they introduce a new mono-wing aerial vehicle design that integrates the robot’s vehicle in a specific spot that is perpendicular to its wing and outside of its surface. This distinctive configuration could improve the vehicle’s balance, while also making it easier to assemble.

“In our quest to determine the dynamic model of the mono-wing, we devised a comprehensive approach that encompassed both frequency domain and time domain techniques,” Banazadeh explained.
“Our methodology included a comparison with a simulation model, programmed based on the underlying physics principles governing the flight of the vehicle. By adopting this multifaceted approach, we aimed to develop a robust and accurate dynamic model that considers various factors and complexities associated with the mono-wing.”
Banazadeh and his colleagues carried out various computational analyses and simulations. Their results offer valuable insight into the flight dynamics of mono-wing vehicles, which could serve as the basis for future works in the field.
“During the controller design phase, we encountered a significant challenge in dealing with the spinning motion of the mono-wing, which made it difficult to issue commands to the vehicle as desired,” Banazadeh said. “We had to devise a technique akin to the cyclic control used in helicopters to effectively control the spinning aspect of the vehicle.”
The technique devised by this team of researchers was tested in a series of simulations and was found to greatly enhance the stability of mono-wing aerial vehicles during flight, while also making it easier to control their movements. Real-world tests on physical robots will help to further validate its effectiveness and generalizability.
“Our recent article encompasses several crucial aspects that can serve as valuable guidance for future researchers,” Banazadeh said. “First, it presents a comprehensive simulation model that lays the foundation for understanding the dynamics of the system. Second, we introduce a unique and innovative approach for identification, highlighting the rules and factors considered throughout the process.”

The approach proposed by Banazadeh and his colleagues was found to increase the accuracy of a vehicle’s dynamic model, while also better representing its complexities. In their paper, the team also introduced a strategy that could be used to better control unconventional time-periodic vehicles. In the future, this strategy could be implemented and tested by groups of researchers worldwide.
“The application of scalable vehicles holds great potential, particularly in their ability to enhance the lives of individuals seeking comfort and amusement,” Banazadeh said. “Our strategy focuses on one key feature of these vehicles: optimized electric energy consumption. In simpler terms, these vehicles not only serve as engaging toys that introduce young individuals to the wonders of engineering, but they also have potential in agricultural contexts by assisting in crop cultivation and harvesting, thus reducing manual efforts.”
The recent work by this research team could soon contribute to the development of new flying robots with a single wing, potentially facilitating their real-world use and commercialization. These robots could have many valuable applications, for instance allowing users to gather data in remote locations, which can in turn help to perform detailed land surveys, map environments, and conduct geological explorations.
“With their simple and compact design and hovering capabilities, these vehicles can access remote and rugged terrains that traditional aircraft find challenging,” Banazadeh added. “By collecting precise and comprehensive data, they can contribute to industries involved in resource management, infrastructure planning, and environmental assessment, Although still in the experimental stages, mono-wing vehicles have the potential to revolutionize remote sensing practices by offering enhanced mapping accuracy and valuable insights into remote or hard-to-reach locations. We believe that all these research directions deserve further exploration.”
More information:
Mohammad Hassan Sabeti et al, Equivalent Linear Model Identification and Periodic Control of a Mono-Wing Aerial Vehicle, Journal of Intelligent & Robotic Systems (2023). DOI: 10.1007/s10846-023-01924-0
© 2023 Science X Network
Citation:
Efficient single-winged aerial robots with reduced energy consumption (2023, August 24)
retrieved 25 August 2023
from https://techxplore.com/news/2023-08-efficient-single-winged-aerial-robots-energy.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Comments are closed