An e-skin that can detect tactile information and produce tactile feedback
In recent years, materials scientists and engineers have introduced increasingly sophisticated materials for robotic and prosthetic applications. This includes a wide range of electronic skins, or e-skins, designed to sense the surrounding environment and artificially reproduce the sense of touch.
Researchers at Tsinghua University recently introduced a new dual-modal tactile e-skin that could enhance the sensing capabilities of robots, while also allowing them to communicate information by leveraging a human user’s sense of touch. This e-skin, presented in a paper posted on the preprint server arXiv and accepted by IEEE ICRA 2024, can both sense tactile information and produce tactile feedback, thus enabling bidirectional touch-based human–robot interactions (HRIs).
“Our paper presents a dual-mode electronic skin (e-skin) designed to enhance human-computer interaction (HRI),” Dr. Wenbo Ding, co-author of the paper, told Tech Xplore. “It addresses the limitations of current electronic skin technology, which can only provide tactile perception or tactile feedback, but not both. The working mechanisms of the sensing and feedback units cannot be seamlessly combined, resulting in larger devices and higher manufacturing costs. “
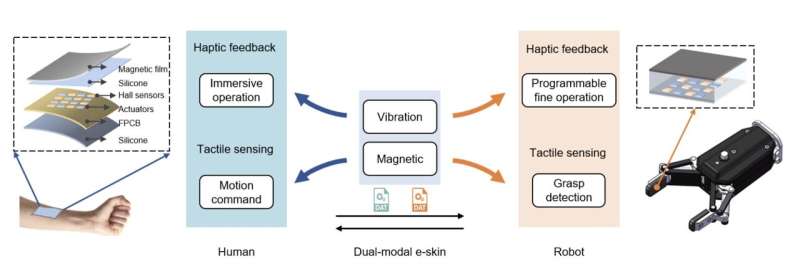
The primary objective of the recent study by Dr. Ding and his colleagues was to develop a dual-modal electronic skin that would also respond to contact forces, via the bidirectional transmission of tactile information. To achieve this, the e-skin they introduced integrates multimodal magnetic tactile sensing with vibration feedback.

“The e-skin integrates a flexible magnetic film, silicon elastomer, Hall sensor array, actuator array, and microcontroller unit,” Dr. Ding explained. “The Hall sensor detects the deformation of the magnetic film caused by mechanical pressure, which leads to changes in the magnetic field, thereby achieving multi-dimensional tactile perception. Concurrently, the actuator array generates mechanical vibration to provide tactile feedback, enhancing the interactive experience between humans and robots.”
Dr. Ding and his colleagues tested a prototype of their e-skin in a series of experiments, also exploring its potential for three main possible applications object recognition, precise weighing and immersive HRI. They found that the e-skin was effective in both sensing tactile information and producing tactile feedback.
“The weighing experiment is particularly innovative, as it employs tactile vibrations in unexpected and creative ways,” Dr. Ding said. “Additionally, the speed of the delicate weighing process can be controlled, and the control accuracy can be improved to (~0.0246 g), meeting daily cooking and industrial weighing requirements. The total cost of the device is less than $26 and weighs less than 29 grams.”
The dual-modal tactile e-skin introduced by Dr. Ding and his colleagues could soon be deployed and tested in a variety of settings. Among other things, it could advance robotic manipulation, enable more precise control in industrial robots, and open new routes for the development of sophisticated prosthetic limbs.
“Our future research and development will focus on miniaturizing e-skin components for a broader range of applications, incorporating new sensing modalities (e.g., temperature sensing), and adding auditory feedback,” Dr. Ding added. “These advancements aim to provide a more comprehensive sensory experience and improve human-machine collaboration.”
More information:
Shilong Mu et al, Dual-modal Tactile E-skin: Enabling Bidirectional Human-Robot Interaction via Integrated Tactile Perception and Feedback, arXiv (2024). DOI: 10.48550/arxiv.2402.05725
arXiv
© 2024 Science X Network
Citation:
An e-skin that can detect tactile information and produce tactile feedback (2024, March 7)
retrieved 8 March 2024
from https://techxplore.com/news/2024-03-skin-tactile-feedback.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Comments are closed