Team develops a revolutionary unpiloted aerial vehicle inspired by science fiction
Imagine a world where science fiction meets reality, where cutting-edge technology brings to life the awe-inspiring scenes from movies like Prometheus. This is the groundbreaking research led by Dr. Fu Zhang, Assistant Professor of Department of Mechanical Engineering at the Faculty of Engineering, the University of Hong Kong (HKU), who has developed a Powered-flying Ultra-underactuated LiDAR-Sensing Aerial Robot (PULSAR) that is poised to redefine the world of unpiloted aerial vehicles (UAVs).
UAVs are already playing an increasingly vital role in search and rescue, cave surveying, and architectural mapping. The PULSAR, aptly named for its similarities to an astronomical pulsar’s self-rotation and scanning pattern, takes UAV technology to new heights. With a micro-computer and a LiDAR sensor, PULSAR boasts full onboard perception, mapping, planning, and control capabilities in both indoor and outdoor environments, all without requiring any external instruments.
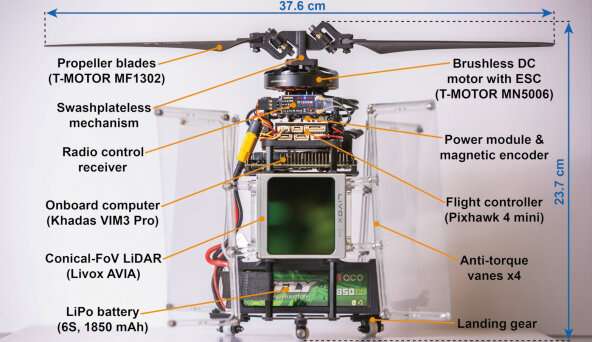
The secret to PULSAR’s incredible functionality lies in its single actuator, which powers the swashplateless mechanism and provides both thrust and moment. Through a series of experiments, Dr. Zhang’s team demonstrated PULSAR’s ability to detect static and dynamic obstacles in real-time, track complex trajectories, and navigate autonomously even in complete darkness.
PULSAR’s robustness also extends to withstanding external wind disturbances, enabling safer and more stable flights in unpredictable conditions. At a maximum wind speed of 4.5 m/s, PULSAR can maintain its hover position within a small area. Such characteristic enables a safer and stable flight in a wild environment.
Besides its aforementioned capabilities, the sensor can also extend the field of view (FoV) through self-rotation motion, which enhances the UAV’s perception and task efficiency. Currently, there are two main approaches for extending the sensor FoV, but both of them consume a significant amount of power.

The first approach involves using sensors with large FoVs, such as fisheye cameras, catadioptric cameras, or 360° LiDAR, which tend to produce distortions. However, 360° LiDAR has a narrow and low-resolution FoV in the vertical direction. The second approach involves using multiple sensors, such as a multi-camera or multi-LiDAR system, but this incurs additional costs and results in longer data processing times.
The invention of PULSAR can save 26.7% of energy consumption compared to a quadrotor UAV with the same propeller disk area and payload, while still maintaining good agility. Thanks to its single actuator propulsion system, PULSAR experiences less energy conversion loss, resulting in a high flight efficiency of 6.65g/W.
Despite its small size, with a diameter of only 37.6 cm and a battery capacity of just 41 Wh, this 1234-g UAV achieved a hover time of over 12 minutes. By removing the LiDAR sensor and installing a larger propeller and battery, the hover time of PULSAR can be extended to more than 40 minutes.
The research finding is presented in Science Robotics.
Dr. Zhang said the research platform established by his team could be conducive to further exploration of self-rotating UAVs. “We believe that it will facilitate the research of UAV control methods under high-speed rotation and simultaneous localization and mapping (SLAM) techniques under aggressive motion.”
More information:
Nan Chen et al, A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation, Science Robotics (2023). DOI: 10.1126/scirobotics.ade4538
The University of Hong Kong
Citation:
Team develops a revolutionary unpiloted aerial vehicle inspired by science fiction (2023, May 30)
retrieved 31 May 2023
from https://techxplore.com/news/2023-05-team-revolutionary-unpiloted-aerial-vehicle.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Comments are closed